
「Worldskills Mobile Robotics Shanghai 2022」の
『LabVIEW版 VMXコントローラ 導入マニュアル』検証シリーズ第5弾!!
メカやエレに疎いながらも、少しずつ楽しくなってきたスタッフS。
今回は、VMXコントローラに距離センサーを取り付けてみました。

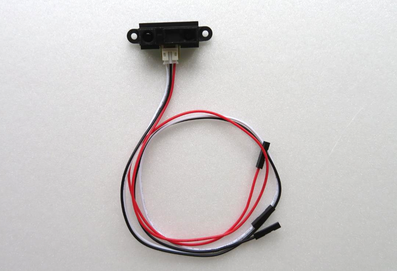
こちらが今回取り付ける、Sharp IR Distance Sensorです。
距離センサーということで、ロボットに取り付けて走行させた時、壁などに衝突しないよう、
設定した距離でロボットを停止させることができるということです。
(できたらすごいなー、ワクワク♪)

まずは、付属のケーブルに片側を接続し、反対側をVMXコントローラに接続します。
簡単に言ってしまうとこれで終了なのですが・・・少し注意事項があります。


VMXコントローラに挿す場所は、「AnalogInput」のチャンネル22-25になります。
今回は、チャンネルNo.22に取り付けました。
ケーブルが赤、黒、白と3本に分かれています。適当に挿してしまってよいのかな?
いえいえ、やっぱり順番があるそうです。
VMXコントローラの「AnalogInput」という記載の近く(写真左)に、「■ー ■+ ■S」と記載があります。
「ー」=黒、「+」=赤、「S」=白との暗黙の了解(常識?)があるようですので、上から黒、赤、白の順番で挿しました。(写真右)


そして、IRセンサーをロボット前方に取り付けました。
次に、IRセンサーが作動して、壁の手前で停止するよう、プログラムを作ります。
まずは試しに、ロボットをスタンドに乗せたままで動かしてみます。

ホイールが動作したら左側から白い紙を差し出します。IRセンサーが感知するとホイールが停止しました!
次にロボットを走行させ、プログラムした通りに壁に見立てた箱の手前15cmで停止するか実験してみます。
どうでしょうか?
箱の上にメージャーを置きましたが、右側から走行し、箱の手前約15cmで停止しました!!
実験成功です!! IRセンサーが正常に感知しているんですね。プログラム通りに停止してくれたので
ちょっと感動してしまいました。